Теория устойчивости
Перейти к навигации
Перейти к поиску
Устойчивость по Ляпунову и асимптотическая устойчивость решений систем дифференциальных уравнений. Устойчивость по Ляпунову решений систем с постоянными коэффициентами.
Понятие об устойчивости по Ляпунову и асимптотической устойчивости
Рассмотрим задачу Коши:
Её решение единственно и определено . Пусть - решение задачи с возмущенным начальным значением: Шаблон:Определение Шаблон:Определение
Точки покоя
Заметим, что погрешность является решением задачи Коши где
Невозмущенному решению соответствует точка покоя системы: Шаблон:Определение
Устойчивость по Ляпунову решений систем с постоянными коэффициентами
Исследуется устойчивость точки покоя однородной системы:
В матричной форме:
, - матрица с постоянными коэффициентами.
Простейшие типы точек покоя

- и вещественны и различны:
- . "устойчивый узел"
- "неустойчивый узел"

неустойчивый узел - "седло"

седло - - точка покоя устойчивая

точка покоя устойчивая - - точка покоя неустойчива

точка покоя неустойчива




- и комплексны и различны:
- "устойчивый фокус"
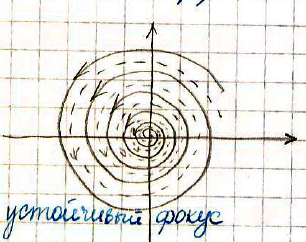
устойчивый фокус - "неустойчивый фокус"

неустойчивый фокус - "центр" - устойчивая точка покоя

устойчивая точка покоя
- "устойчивый фокус"



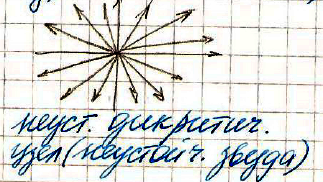
- - вещественны и есть 2 линейно независимых вектора:
- "устойчивый звездный узел"

устойчивый звездный узел - "неустойчивый звездный узел"

неустойчивый звездный узел - покой -

неустойчивая точка покоя
- "устойчивый звездный узел"



- - вещественны и есть только 1 линейно независимый вектор:
- "устойчивый вырожденный узел"

устойчивый вырожденный узел - "неустойчивый вырожденный узел"
неустойчивый вырожденный узел - - неизолированная неустойчивая точка покоя

неизолированная неустойчивая точка покоя
- "устойчивый вырожденный узел"



Исследование на устойчивость по первому приближению. Теорема Ляпунова об устойчивости. Теорема Четаева о неустойчивости.
Исследование на устойчивость по первому приближению
. . Первое слагаемое равно нулю, второе является первым дифференциалом, каждое слагаемое равно . Третье слагаемое есть
Следовательно (1) можно преобразовать к виду . Тогда является системой уравнений первого приближения. Система (1) стационарна в первом приближении не зависит от .
при